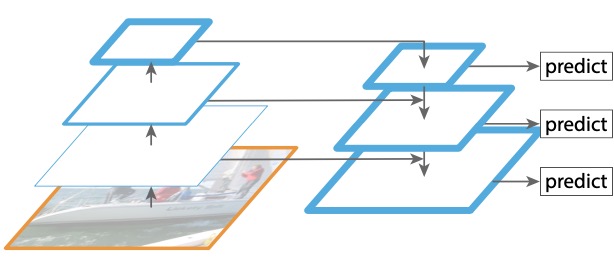
常见的检测网络结构 (a) 中使用图像金字塔构建特征金字塔, 在每一个图像尺度下单独提取特征, 耗时 (b) 使用单尺度特征图用来快速的目标检测 (c) 使用单方向多个
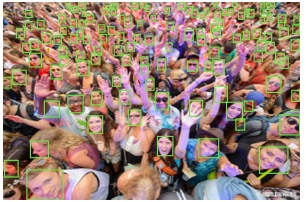
最近看了一下人脸检测的论文, 除了通用的目标检测方法, 看见了这篇论文, 整体上而言和yolo-v3结构是类似的, SSH 设计了不同的检测头. SSH 网络 SSH 网
yolo-v1作为anchor free 的目标检测方法, 虽然已经较老,但深入理解其原理还是很有必要的. 对于个人而言, 完全从头实现目标检测算法是必不可
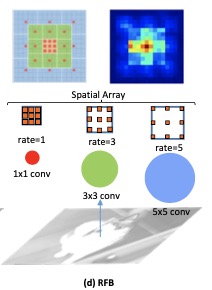
RFB 模块主要是针对在保持轻量级网络的速度快、计算量小的情况下, 提升检测的精度, 模块如其名, 从感受野角度入手, 增强轻量级网络的特征表示, 主要用来
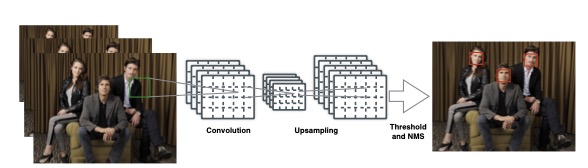
DenseBox 是与yolo, faster rcnn同期的目标检测网络, 与yolo v1一样采用 anchor-free的思想, 网络结构采用FCN来实现目标检测 主要创新点
目标检测主要有两种实现,一是faster-rcnn为代表的proposal two-stage 系列,二是以YOLO为代表的one-stage 的回归网络. 主要区
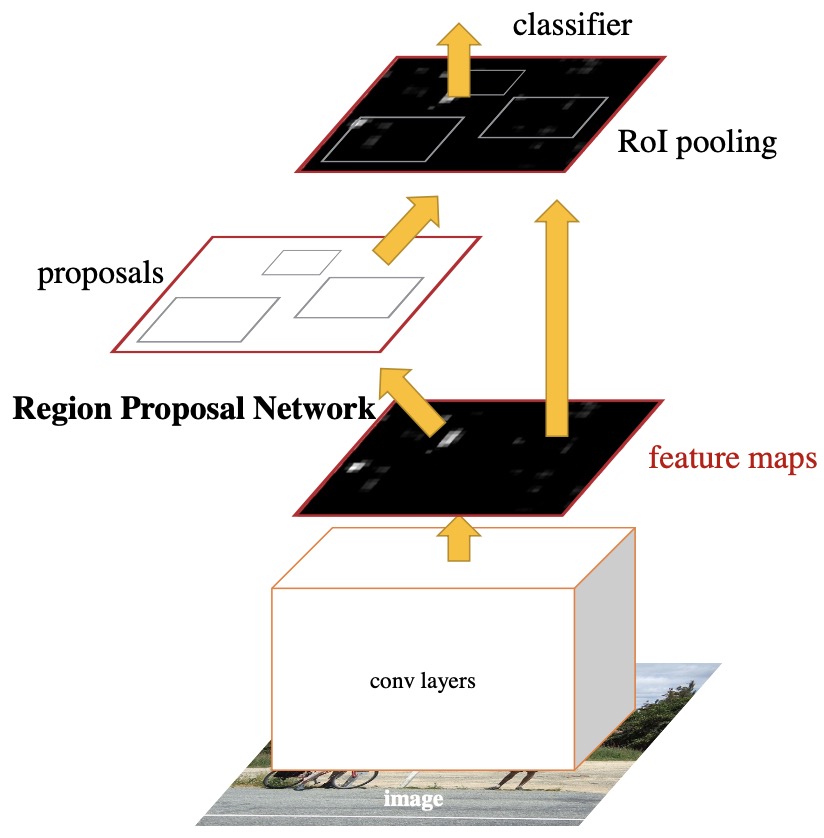
主要贡献 提出 RPN 网络, 将region proposal 和目标检测统一到一个卷积网络中 anchor 的使用 网络结构 faster rcnn 检测流程如上图所示: 图像经过卷积层提取 feature maps 然后在RPN
SSD发表在2016ECCV, 是one-stage目标检测算法中经典的框架之一. 其精度优于yolo-v1, 在yolo-v2之后被超越. SSD 具有
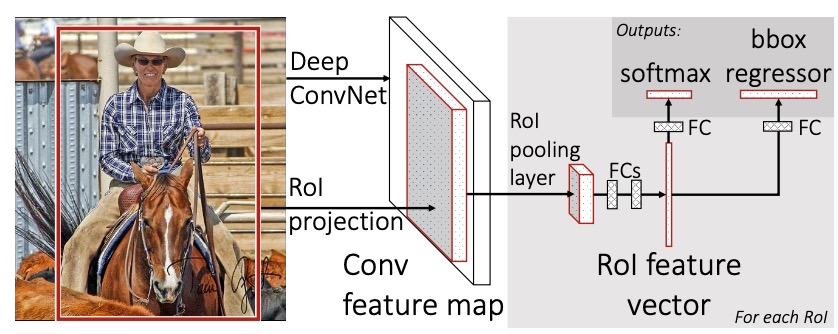
主要贡献 RCNN, SPPnet的训练是 multi-stage的, 需要每一步训练一个模型. faste rcnn 通过 multi-task loss 将分类与边框回归融合到网络中, 前两者为训练SVM
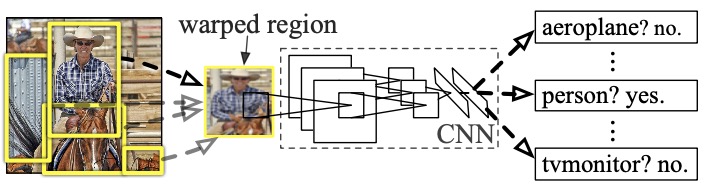
Rcnn 作为使用CNN进行目标检测的开山之作, 之后,在其基础上延展出了fast rcnn, faster rcnn, mask rcnn, 等等, 都是在针对前人的问题不断改进, 本文对rcnn 进行小结
