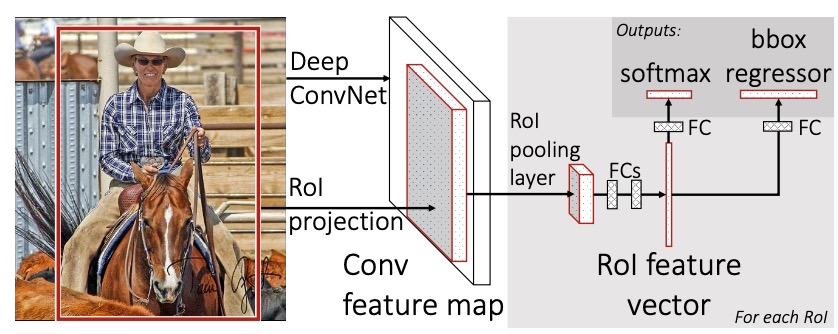
主要贡献 RCNN, SPPnet的训练是 multi-stage的, 需要每一步训练一个模型. faste rcnn 通过 multi-task loss 将分类与边框回归融合到网络中, 前两者为训练SVM
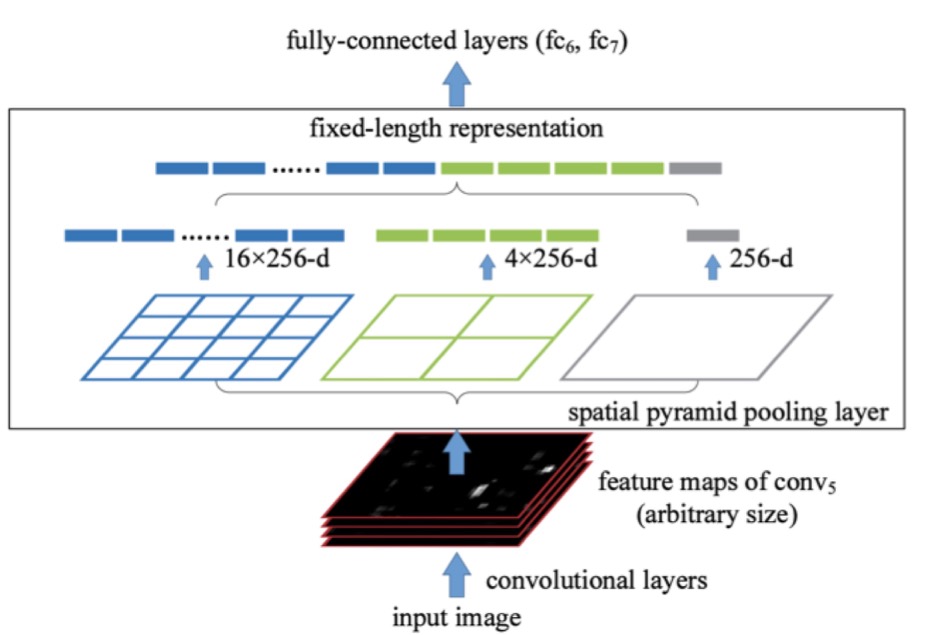
在 RCNN 中说到, RCNN存在的一个问题是需要将region proposal进行warp到固定尺寸,这会带来失真等影响. 这是由于具有全连接的CNN
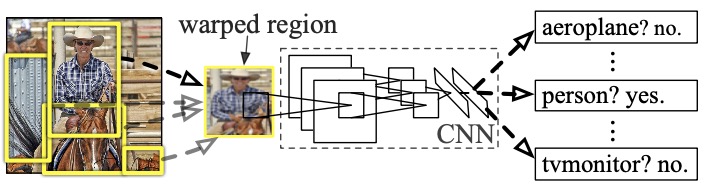
Rcnn 作为使用CNN进行目标检测的开山之作, 之后,在其基础上延展出了fast rcnn, faster rcnn, mask rcnn, 等等, 都是在针对前人的问题不断改进, 本文对rcnn 进行小结
对于主流的 one-stage(Faster r-cnn…) 或者是 tow-stage(SSD, YOLO…)的目标检测算法, 大多都采用了 anchor/prior box机制. Anchor-box 的意义 在yolo-v1 中, 每个grid 输出两个b
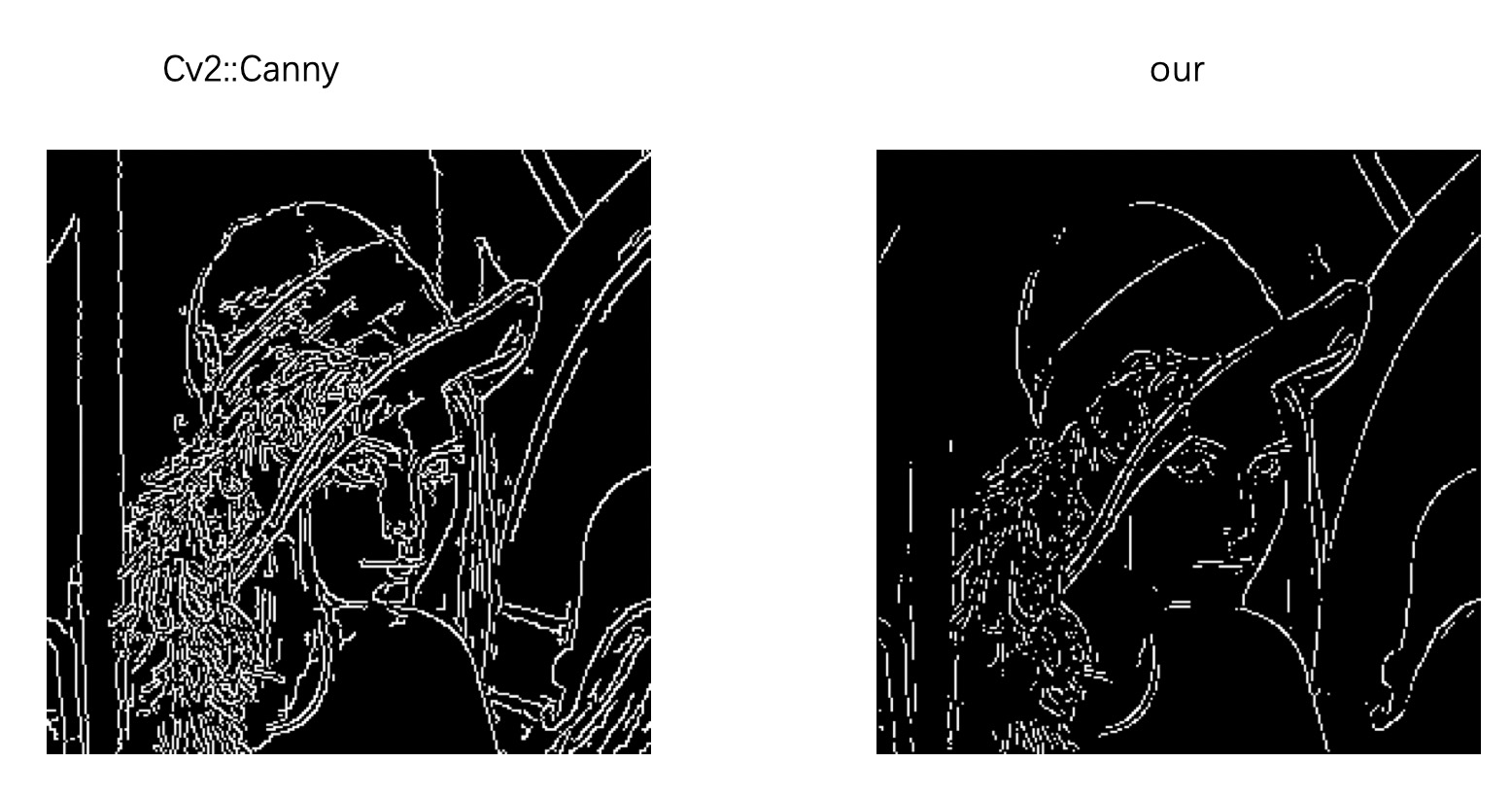
最近刚好在做分割,顺手玩玩用GAN做边缘检测. 本意是想在BSDS轮廓分割数据集上做,同时验证针对样本极不平衡的损失函数挑选问题,简单做个小结
L1、L2以及Smooth_L1损失函数作为目标检测中回归层常用的损失函数,对他们进行一个对比分析. 三者公式对比如下: 分别对三者求导数: L2
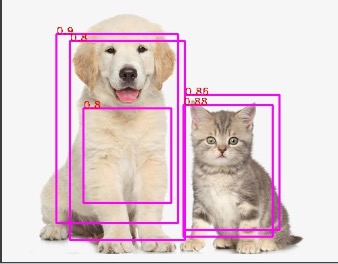
非极大值抑制(Non-Maximum Suppression,NMS),即抑制不是极大值的元素,可以理解为局部最大搜索. 在目标检测中, 无论是 one-stage
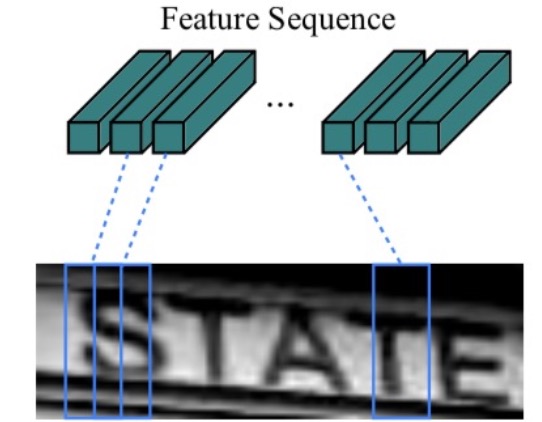
主流的OCR识别分为两个部分:先检测出文字区域再识别文字。检测可采用通用的目标检测方法以及针对于文本检测的网络,识别主要是CRNN及其变体。

East是旷视科技2017年发表的论文,针对于场景文本检测。East网络也可以轻易的扩展到其他目标检测任务上。我主要在改进版的East基础上
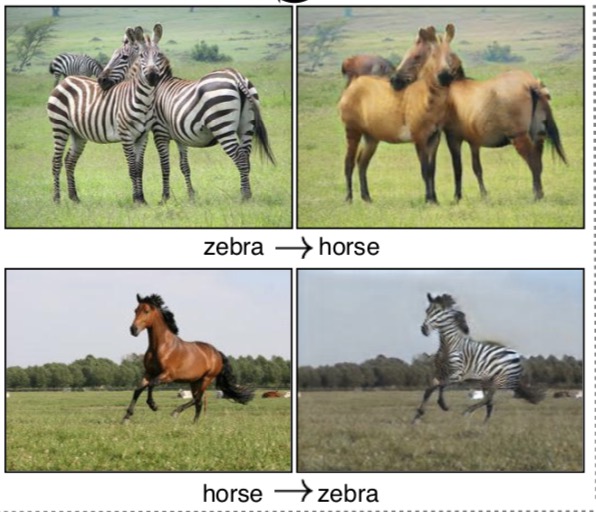
在cyclegan之前,对于两个域的图像进行转化,比如图像风格转换,它们的训练集图像都是成对的.而cyclegan则解决了训练图像必须成对的
