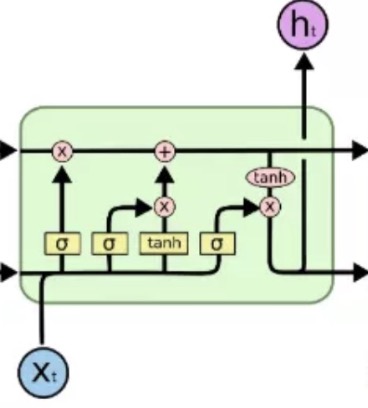
记录自己对LSTM结构的理解,以及结合keras在实现LSTM模型时数据的输入数据等的处理。 1.SimpleRNN 对于多层感知机网络而言,是假设每个输入数据具有
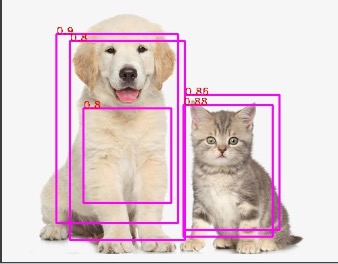
非极大值抑制(Non-Maximum Suppression,NMS),即抑制不是极大值的元素,可以理解为局部最大搜索. 在目标检测中, 无论是 one-stage
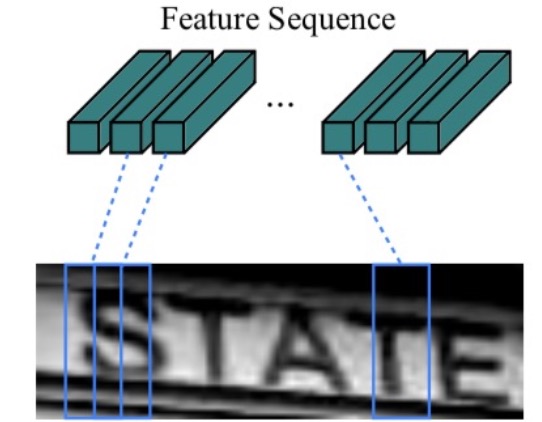
主流的OCR识别分为两个部分:先检测出文字区域再识别文字。检测可采用通用的目标检测方法以及针对于文本检测的网络,识别主要是CRNN及其变体。

East是旷视科技2017年发表的论文,针对于场景文本检测。East网络也可以轻易的扩展到其他目标检测任务上。我主要在改进版的East基础上
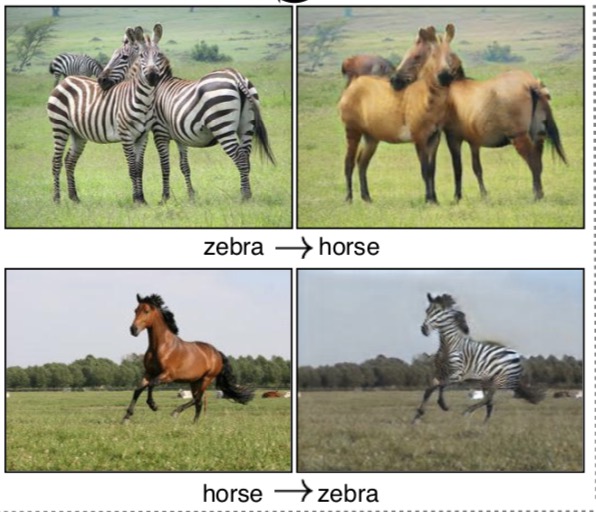
在cyclegan之前,对于两个域的图像进行转化,比如图像风格转换,它们的训练集图像都是成对的.而cyclegan则解决了训练图像必须成对的
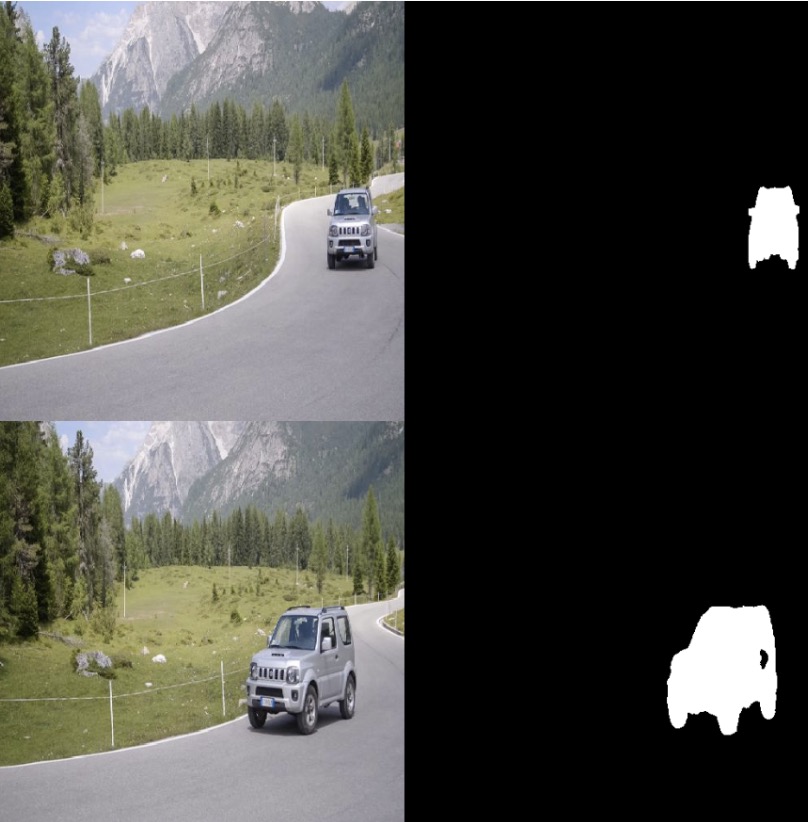
.img-wrap{ border: 1px } img{ float: left; width: 25%; height: 160; } one-shot 半监督视频单目标分割 网络实现 采用keras实现,网络结构如下。 类似于unet,但没有unet那么多的参数。使用de
神经网络的训练是一个复杂的问题,很多时候会遇见即使拿到了别人的代码也训练不出来,无法复现。 以下是37个训练网络的建议英文原文: 1.最基本的措

背景 近年来版权意识的提高,在使用别人图片的时候(尤其是商业领域),需要检测图片是否有别的公司的水印( 主要针对人眼可见的水印,除去数字加密等水

写在前面的话,硕士研究生阶段从接触VOS到深入研究,差不多一共有两年时间。因为自己刚接触这个研究领域的时候,用深度学习做视频分割的还相对较少
双边滤波器 百科 “双边滤波(Bilateral Filter)是非线性滤波中的一种。这是一种结合图像的空间邻近度与像素值相似度的处理
