
图像去雾: Single Image Haze Removal Using Dark Channel Prior
此论文是何凯明博士在2009CVPR上的发表的论文, 在图像增强领域可谓无人不知. 论文的方法主要基于对无雾室外图像的统计. 本文主要对原文以及参考Github 上的代码进行理解
论文思想
在计算机视觉中, 带雾图像被建模为:
$$I(x) = J(x)t(x) + A(1-t(x)), (1)$$
其中, I(x) 为观测到的强度即待去雾图像, J(x) 为要恢复的无雾图像, A(x) 是全球大气光成分. t(x) 为透射率. 图像去雾的目标则是从 中恢复出 J, A, t.
暗通道先验基于以下对室外无雾图像的观测: 在大多数非天空局部区域中, 有一些像素至少在一个颜色通道有非常低的强度. 换言之,这些区域的最小强度是很低的值. 形式化如下:

Ω(x) 表示以 x 为中心的区域. 区域大小可指定, 求此区域的暗通道相当于在整个RGB通道对该区域进行最小值滤波. 作者通多大量观测得到结论: 如果J 是室外无雾图像, 除开天空区域 $J ^{dark}$ 应该是很小的值,趋近于0.
暗通道中的低强度主要归因于三个因素:a)阴影. 例如,城市景观图像中的汽车,建筑物和窗户内部的阴影,或景观图像中的叶子,树木和岩石的阴影; b)彩色物体或表面。 例如,任何颜色通道中缺少颜色的任何对象(例如,绿草/树木/植物,红色或黄色的花/叶和蓝色的水面)都会导致暗通道中的值降低; c)深色物体或表面。 例如深色的树干和石头。 由于自然的室外图像通常充满阴影和色彩,因此这些图像的暗通道真的很暗!
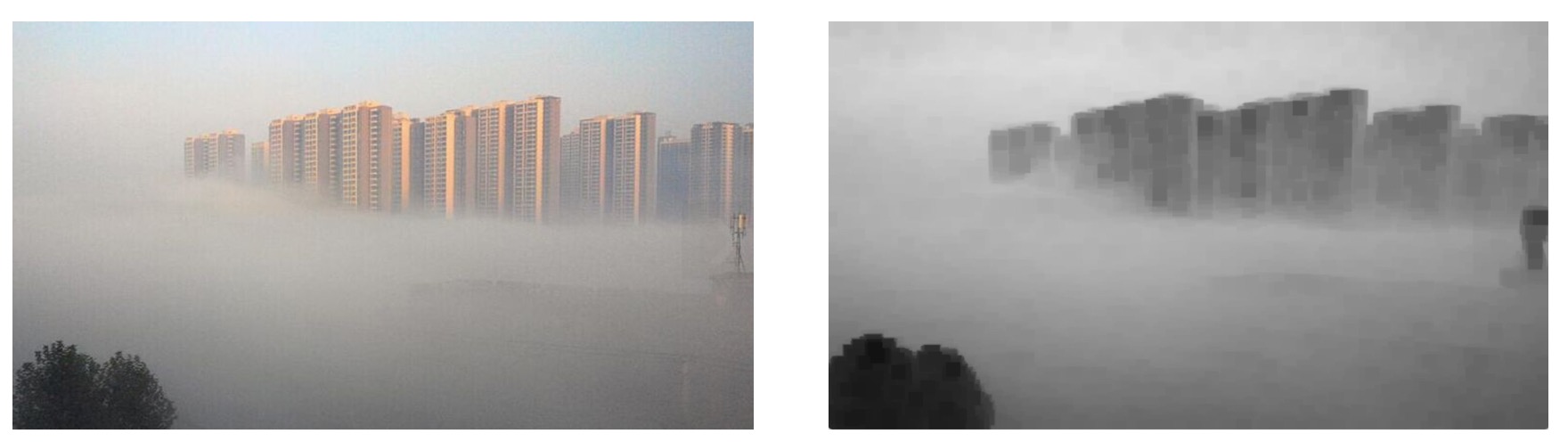
无雾图片暗通道如下图所示:

带雾图片暗通道如下:
透射率估计
先假设全球大气光成分A已知。 同时假定 以x 为中心的局部区域 Ω(x) 透射率是常量. 由公式1 对局部区域进行进行最小操作, 最小操作独立的在三个通道进行.


在三个通道上取最小值可得:

根据暗通道先验理论, 无雾图像的暗通道幅度趋于0:

$A ^c$ 恒为正数, 因此:

将(10)代入(8)可得透射率的预估值:

考虑到在现实生活中,即使是晴天白云,空气中也存在着一些颗粒,因此,看远处的物体还是能感觉到雾的影响,另外,雾的存在让人类感到景深的存在,因此,有必要在去雾的时候保留一定程度的雾, 上式修正为, ω 设为0.95:

估计全球大气光
文中表明带雾图像的暗通道很好地近似了雾密度, 借助于暗通道图来从有雾图像中估计全球大气光:
- 从暗通道图中按照亮度的大小取前0.1%的像素。
- 在这些位置中,在原始有雾图像I中寻找对应的具有最高亮度的点的值,作为A值。
恢复图像
在已经有了I,A,t 的情况下,便可以求得J。

其中, $t _0$ 用来防止 $t(x)$ 过小而导致的 J 过亮.
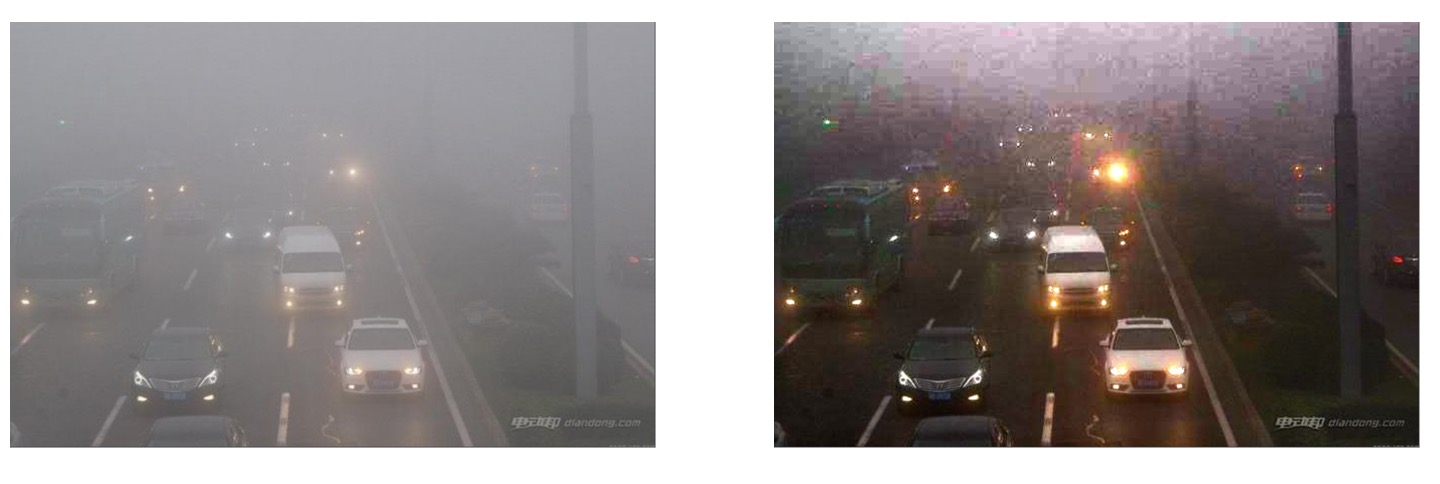
示例
code
import cv2
import math
import numpy as np
def dark_channel(im, sz):
# 暗通道计算
b, g, r = cv2.split(im)
# 取每个像素位置RGB三通道中的最小值
dc = cv2.min(cv2.min(r, g), b)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (sz, sz))
# 进行最小值滤波
dark = cv2.erode(dc, kernel)
return dark
def atm_light(im, dark):
# 计算全球大气光的值
[h, w] = im.shape[:2]
imsz = h * w
numpx = int(max(math.floor(imsz / 1000), 1))
darkvec = dark.reshape(imsz, 1)
imvec = im.reshape(imsz, 3)
indices = darkvec.argsort()
indices = indices[imsz - numpx::]
atmsum = np.zeros([1, 3])
# 使用前0.1%的均值, 而不是最大值
for ind in range(1, numpx):
atmsum = atmsum + imvec[indices[ind]]
A = atmsum / numpx
return A
def transmission_estimate(im, A, sz):
# 按照公式(12)计算
omega = 0.95
im3 = np.empty(im.shape, im.dtype)
for ind in range(0, 3):
im3[:, :, ind] = im[:, :, ind] / A[0, ind]
transmission = 1 - omega * dark_channel(im3, sz)
return transmission
def guided_filter(im, p, r, eps):
# http://kaiminghe.com/eccv10/index.html
mean_I = cv2.boxFilter(im, cv2.CV_64F, (r, r))
mean_p = cv2.boxFilter(p, cv2.CV_64F, (r, r))
mean_Ip = cv2.boxFilter(im * p, cv2.CV_64F, (r, r))
cov_Ip = mean_Ip - mean_I * mean_p
mean_II = cv2.boxFilter(im * im, cv2.CV_64F, (r, r))
var_I = mean_II - mean_I * mean_I
a = cov_Ip / (var_I + eps)
b = mean_p - a * mean_I
mean_a = cv2.boxFilter(a, cv2.CV_64F, (r, r))
mean_b = cv2.boxFilter(b, cv2.CV_64F, (r, r))
q = mean_a * im + mean_b
return q
def transmission_refine(im, et):
gray = cv2.cvtColor(im, cv2.COLOR_BGR2GRAY)
gray = np.float64(gray) / 255
r = 60
eps = 0.0001
t = guided_filter(gray, et, r, eps)
return t
def recover(im, t, A, tx=0.1):
# 公式(16)
res = np.empty(im.shape, im.dtype)
t = cv2.max(t, tx)
for ind in range(0, 3):
res[:, :, ind] = (im[:, :, ind] - A[0, ind]) / t + A[0, ind]
return res
if __name__ == '__main__':
src = cv2.imread("1.png")
I = src.astype('float64') / 255
dark = dark_channel(I, 15)
A = atm_light(I, dark)
te = transmission_estimate(I, A, 15)
t = transmission_refine(src, te)
J = recover(I, t, A, 0.1)
cv2.imshow("dark", dark)
cv2.imshow("t", t)
cv2.imshow('I', src)
cv2.imshow('J', J)
cv2.imwrite("J.png", J * 255)
cv2.waitKey()
