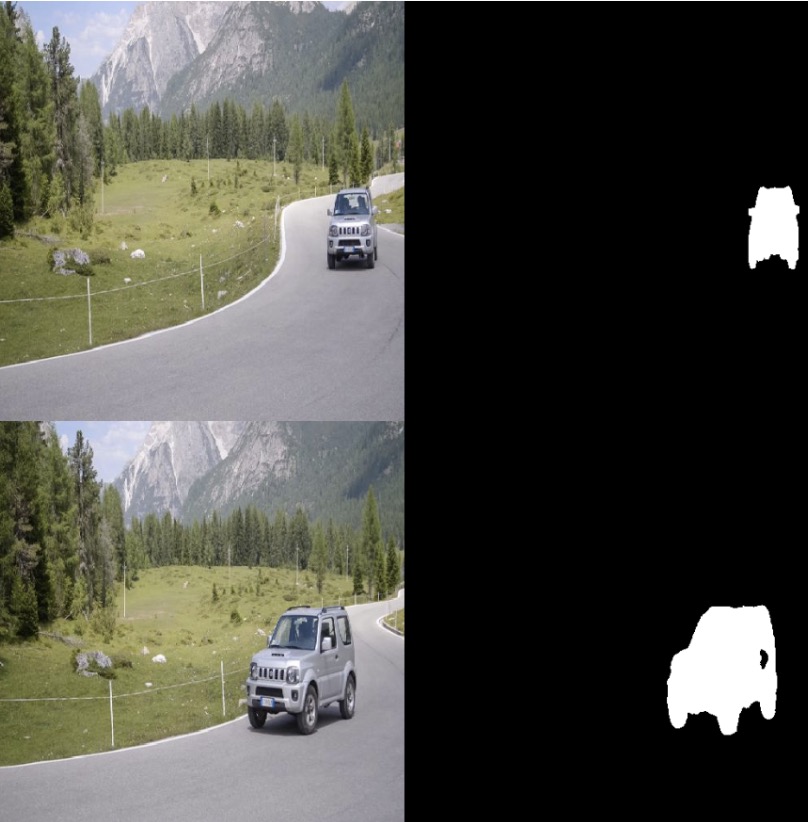
.img-wrap{ border: 1px } img{ float: left; width: 25%; height: 160; } one-shot 半监督视频单目标分割 网络实现 采用keras实现,网络结构如下。 类似于unet,但没有unet那么多的参数。使用de
模板匹配 最近准备把学过的一些知识整理写成博客,加深印象。 模板匹配是一种最原始、最基本的模式识别方法,研究某一特定对象物的图案位于图像的什么地

import keras from keras.layers import Input,Dense,Conv2D from keras.layers import MaxPooling2D,Flatten,Convolution2D from keras.models import Model import os import numpy as np from PIL import Image from keras.optimizers import SGD from scipy import misc root_path = os.getcwd() train_names = ['bear','blackswan','bus','camel','car','cows','dance','dog','hike','hoc','kite','lucia','mallerd','pigs','soapbox','stro','surf','swing','train','walking'] test_names = ['boat','dance-jump','drift-turn','elephant','libby'] def load_data(seq_names,data_number,seq_len): #生成图片对 print('loading data.....') frame_num = 51 train_data1 = [] train_data2 = [] train_lab = [] count = 0 while count < data_number:
PSNR(Peak Signal to Noise Ratio):峰值信噪比 使用局部均值误差来判断差异,对于两个H*W*C的图像,I1,I2 其中n为采样值的比特数,比如
